SolrCloud是基于Solr和Zookeeper的分布式搜索方案,是正在开发中的Solr4.0的核心组件之一,它的主要思想是使用Zookeeper作为集群的配置信息中心。它有几个特色功能:
- 集中式的配置信息
- 自动容错
- 近实时搜索
- 查询时自动负载均衡
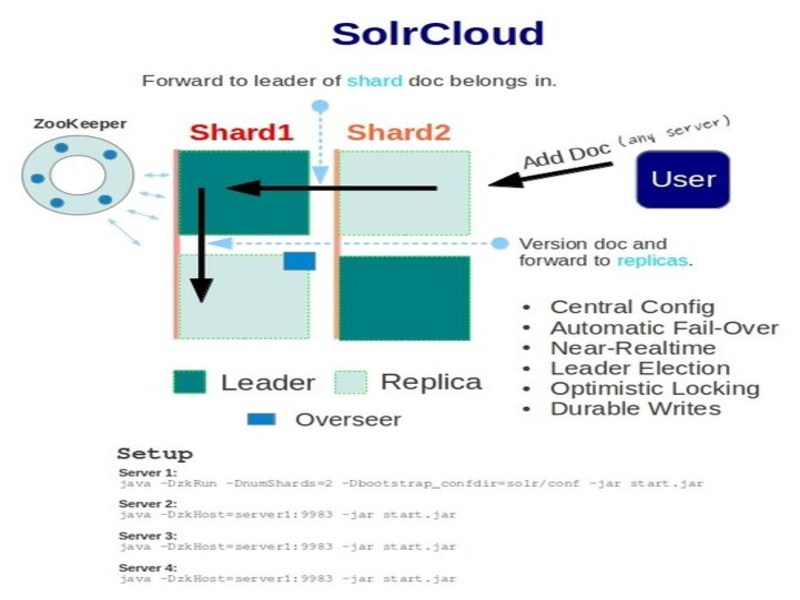
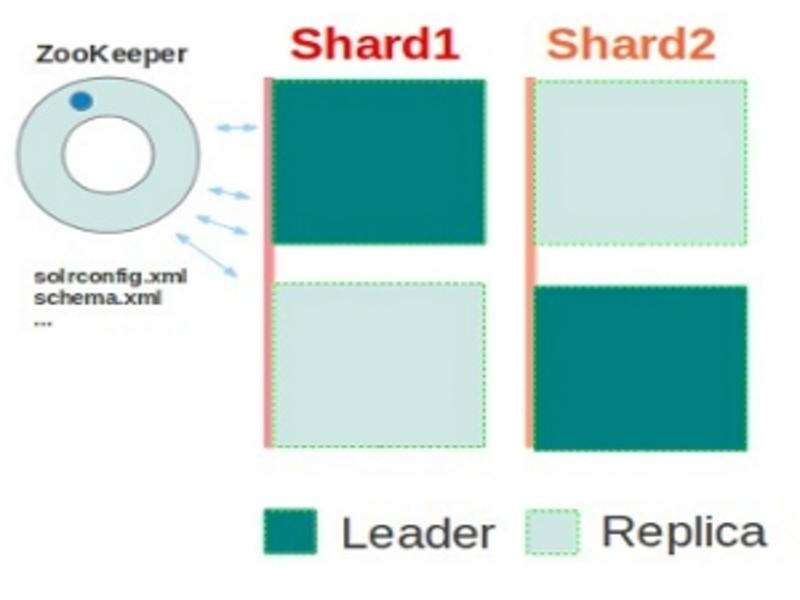
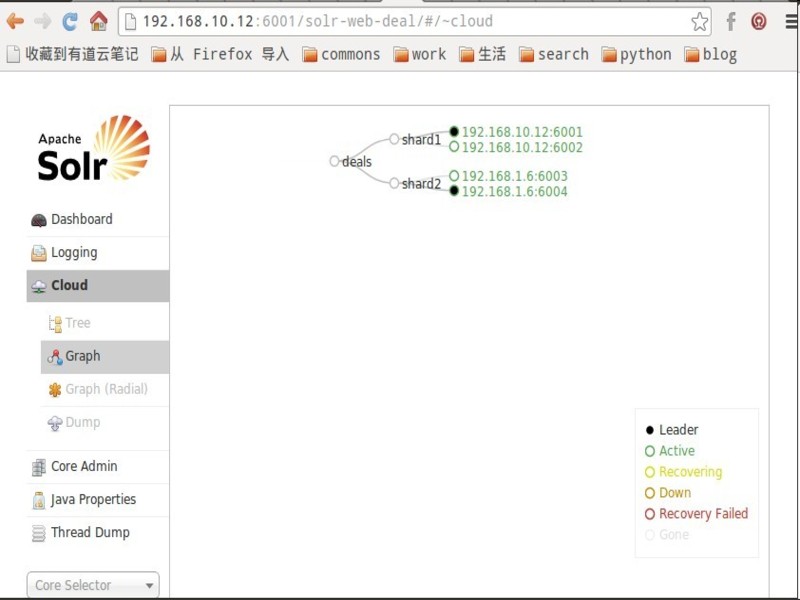
基本可以用上面这幅图来概述,这是一个拥有4个Solr节点的集群,索引分布在两个Shard里面,每个Shard包含两个Solr节点,一个是Leader节点,一个是Replica节点,此外集群中有一个负责维护集群状态信息的Overseer节点,它是一个总控制器。集群的所有状态信息都放在Zookeeper集群中统一维护。从图中还可以看到,任何一个节点都可以接收索引更新的请求,然后再将这个请求转发到文档所应该属于的那个Shard的Leader节点,Leader节点更新结束完成,最后将版本号和文档转发给同属于一个Shard的replicas节点。
###下载相关程序
1、下载Solr-4.x http://lucene.apache.org/solr/downloads.html
2、下载Tomcat http://tomcat.apache.org/download-70.cgi
3、下载Zookeeper http://zookeeper.apache.org/releases.html
###安装Zookeeper 单机zookeeper
#解压 $ tar -zxvf zookeeper-3.4.5.tar.gz #更改配置 $ cp zookeeper-3.4.5/conf/zoo_sample.cfg zookeeper-3.4.5/conf/zoo.cfg #启动服务 $ bin/zkServer.sh start #验证 $ bin/zkCli.sh -server host:port
zookeeper主要配置:
# Zookeeper 服务器之间或客户端与服务器之间维持心跳的时间间隔,也就是每个 tickTime 时间就会发送一个心跳 tickTime=2000 # 这个配置项是用来配置 Zookeeper 接受客户端(这里所说的客户端不是用户连接 Zookeeper 服务器的客户端,而是 Zookeeper 服务器集群中连接到 Leader 的 Follower 服务器)初始化连接时最长能忍受多少个心跳时间间隔数。当已经超过 5个心跳的时间(也就是 tickTime)长度后 Zookeeper 服务器还没有收到客户端的返回信息,那么表明这个客户端连接失败。总的时间长度就是 5*2000=10 秒 initLimit=10 # 这个配置项标识 Leader 与 Follower 之间发送消息,请求和应答时间长度,最长不能超过多少个 tickTime 的时间长度,总的时间长度就是 2*2000=4 秒 syncLimit=5 # Zookeeper 保存数据的目录,默认情况下,Zookeeper 将写数据的日志文件也保存在这个目录里。 dataDir=/tmp/zookeeper # 这个端口就是客户端连接 Zookeeper 服务器的端口,Zookeeper 会监听这个端口,接受客户端的访问请求。 clientPort=2181
zookeeper集群
1、在zookeeper-3.4.5/conf/zoo.cfg追加server配置
server.1=192.168.10.14:2888:3888 server.2=192.168.10.12:2888:3888 server.3=192.168.10.16:2888:3888
2、在每个Zookeeper保存数据的目录下指定myid文件,对应服务名称ID
#如server.id,则在myid文件中写1即可 $ vi /tmp/zookeeper/myid
3、启动zookeeper服务 bin/zkServer.sh start
###SolrCloud使用Zookeeper管理集群的基本流程 第一台Solr服务器启动过程:</br>
- 启动第一台zookeeper服务器,作为集群状态信息的管理者
- 将自己这个节点注册到/node_states/目录下,同时将自己注册到/live_nodes/目录下
- 创建/overseer_elect/leader,为后续Overseer节点的选举做准备,新建一个Overseer
- 更新/clusterstate.json目录下json格式的集群状态信息
- 本机从Zookeeper中更新集群状态信息,维持与Zookeeper上的集群信息一致
- 上传本地配置文件到Zookeeper中,供集群中其他solr节点使用,后面启动solr则不会上传配置文件,因为都是使用第一台solr服务启动上传的配置文件为准.
- 启动本地的Solr服务器,Overseer会得知shard中有第一个节点进来,更新shard状态信息,并将本机所在节点设置为shard1的leader节点,并向整个集群发布最新的集群状态信息。
- 本机从Zookeeper中再次更新集群状态信息,第一台solr服务器启动完毕。
第二台solr服务器的启动过程:</br>
- 连接到集群所在的Zookeeper
- 将自己这个节点注册到/node_states/目录下,同时将自己注册到/live_nodes/目录下
- 本机从Zookeeper中更新集群状态信息,维持与Zookeeper上的集群信息一致
- 从集群中保存的配置文件加载Solr所需要的配置信息
- 启动本地solr服务器,将本节点注册为集群中的shard,并将本机设置为shard2的Leader节点
- 本机从Zookeeper中再次更新集群状态信息,第二台solr服务器启动完毕.
###SolrCloud安装配置 包含2个shard的集群,每个shard中有replica节点
- 安装Tomcat
- 安装zookeeper集群,启动,我这里就使用上面的zookeeper集群
-
拷贝solr项目中的solr配置文件到指定路径
$ copy -r solr $TOMCAT_HOME1/conf $ copy -r solr $TOMCAT_HOME2/conf $ copy -r solr $TOMCAT_HOME3/conf $ copy -r solr $TOMCAT_HOME4/conf
-
更改第一台tomcat的启动脚本catalina.sh,添加solr_home及配置信息到JAVA_OPTS,添加到开头就行,在catalina.sh指定solr_home,也可以在solr.war包中的web.xml中配置
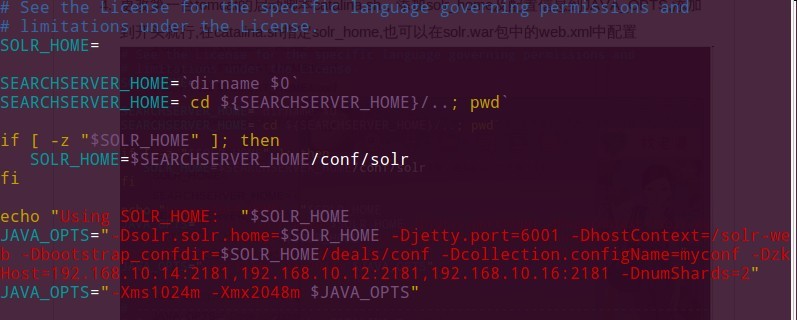
-
更改第二台及其他tomcat的启动脚本catalina.sh
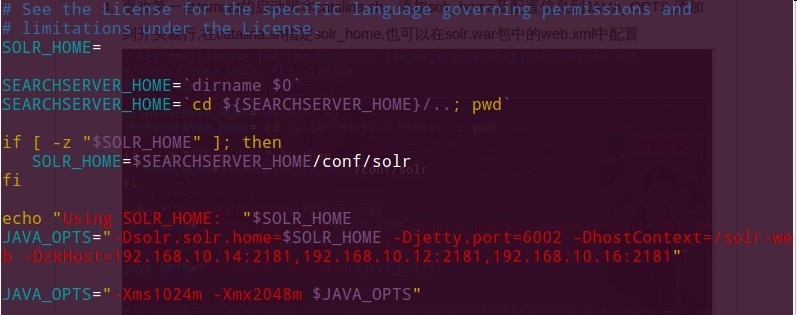
-
配置完所有的solr服务,则从第一台开始启动
$TOMCAT_HOME1/bin/catalina.sh run
####备注 1、solr.xml配置文件解释
<cores adminPath="/admin/cores" defaultCoreName="deals" host="${host:}" hostPort="${jetty.port:}" hostContext="${hostContext:}" leaderVoteWait="${leaderVoteWait:1000}">
<core name="deals" instanceDir="deals" />
</cores>
hostContext:指定服务名称
hostPort:指定端口
leaderVoteWait:选举leader的等待时间ms